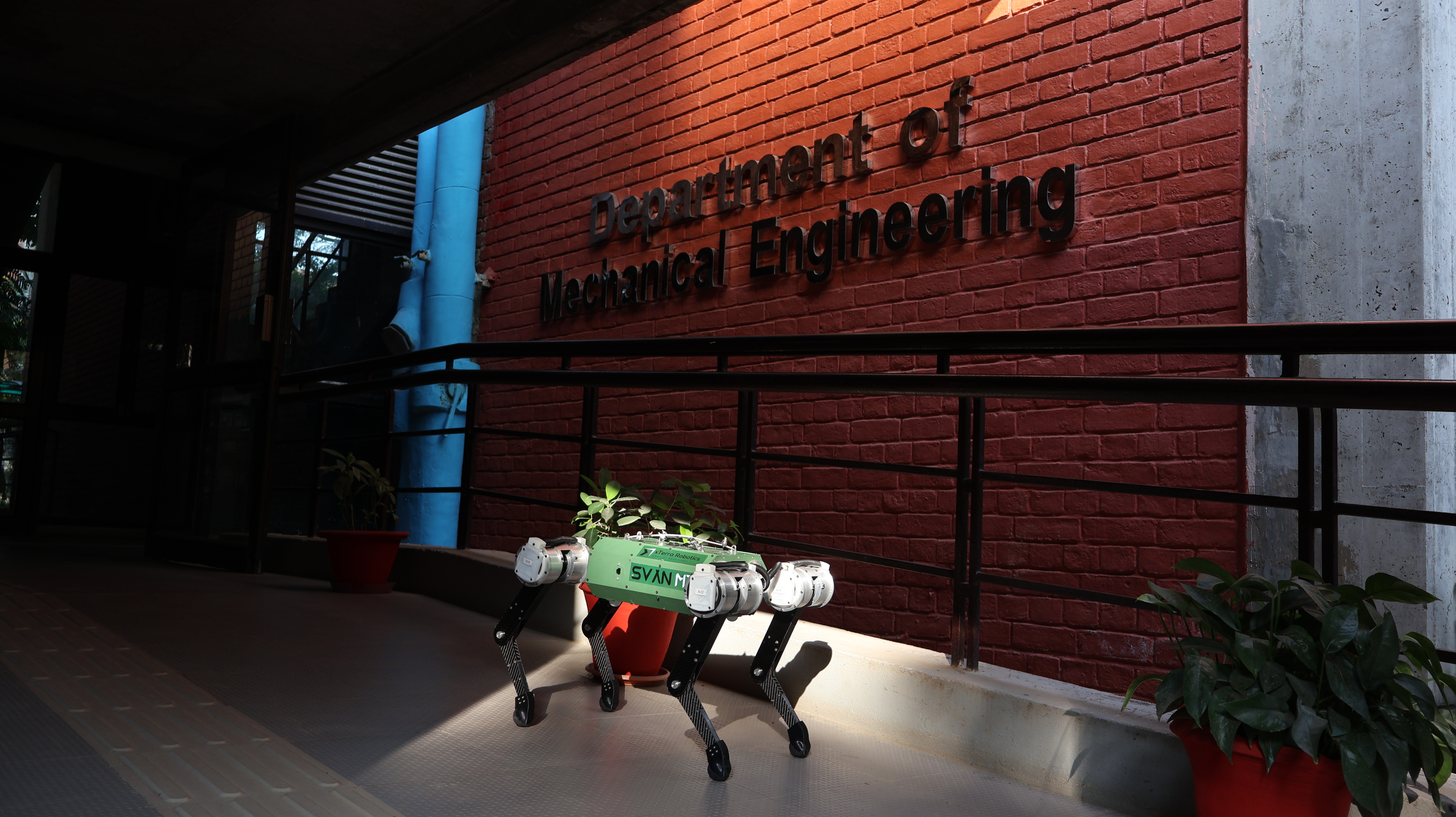
Quadrupeds
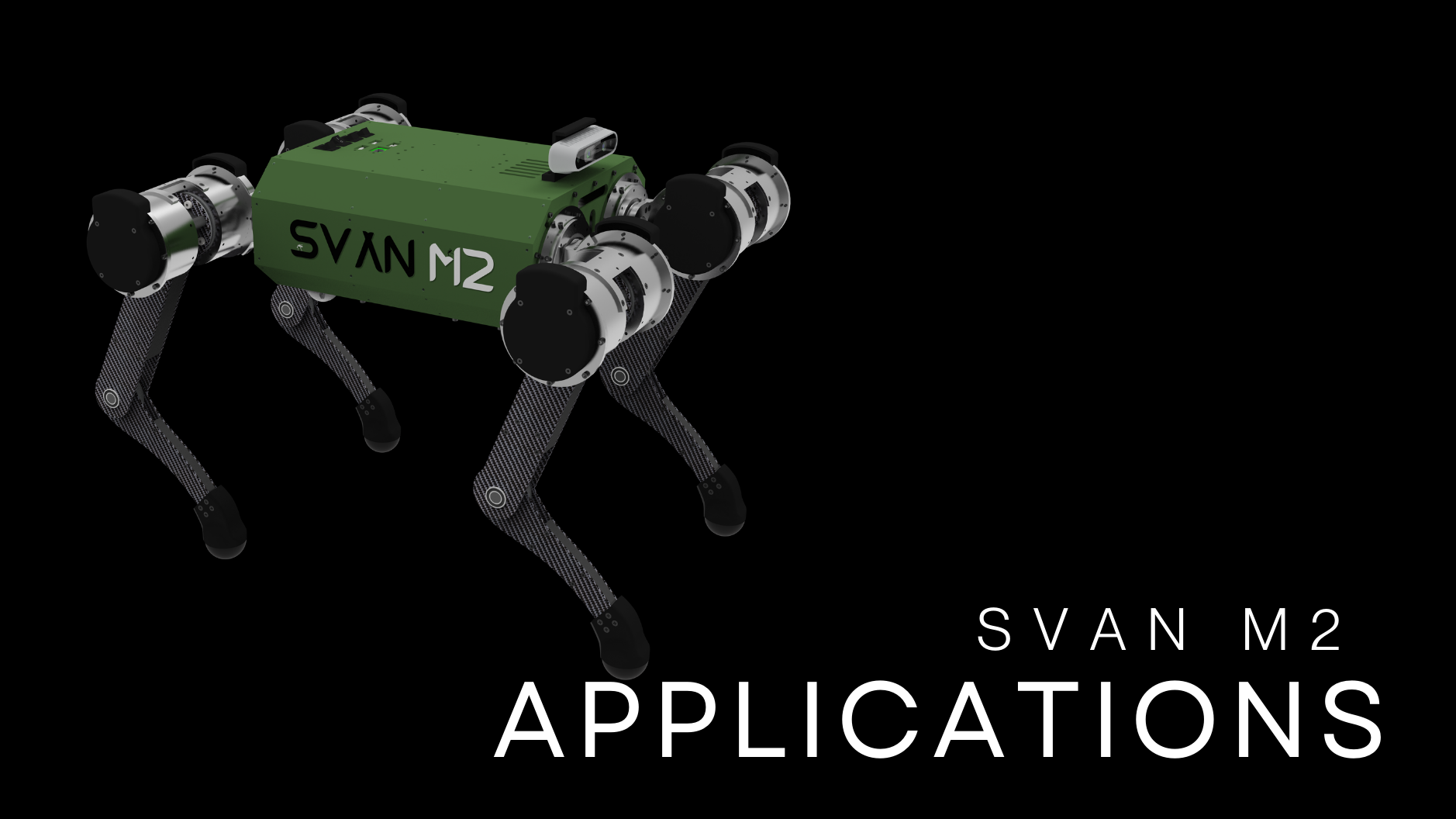
Quadruped Robot with 18 degrees of actuation
Technical Specifications
- Custom QDD actuators
- Weighing 11.2 kg, and a payload capacity of 7 kg
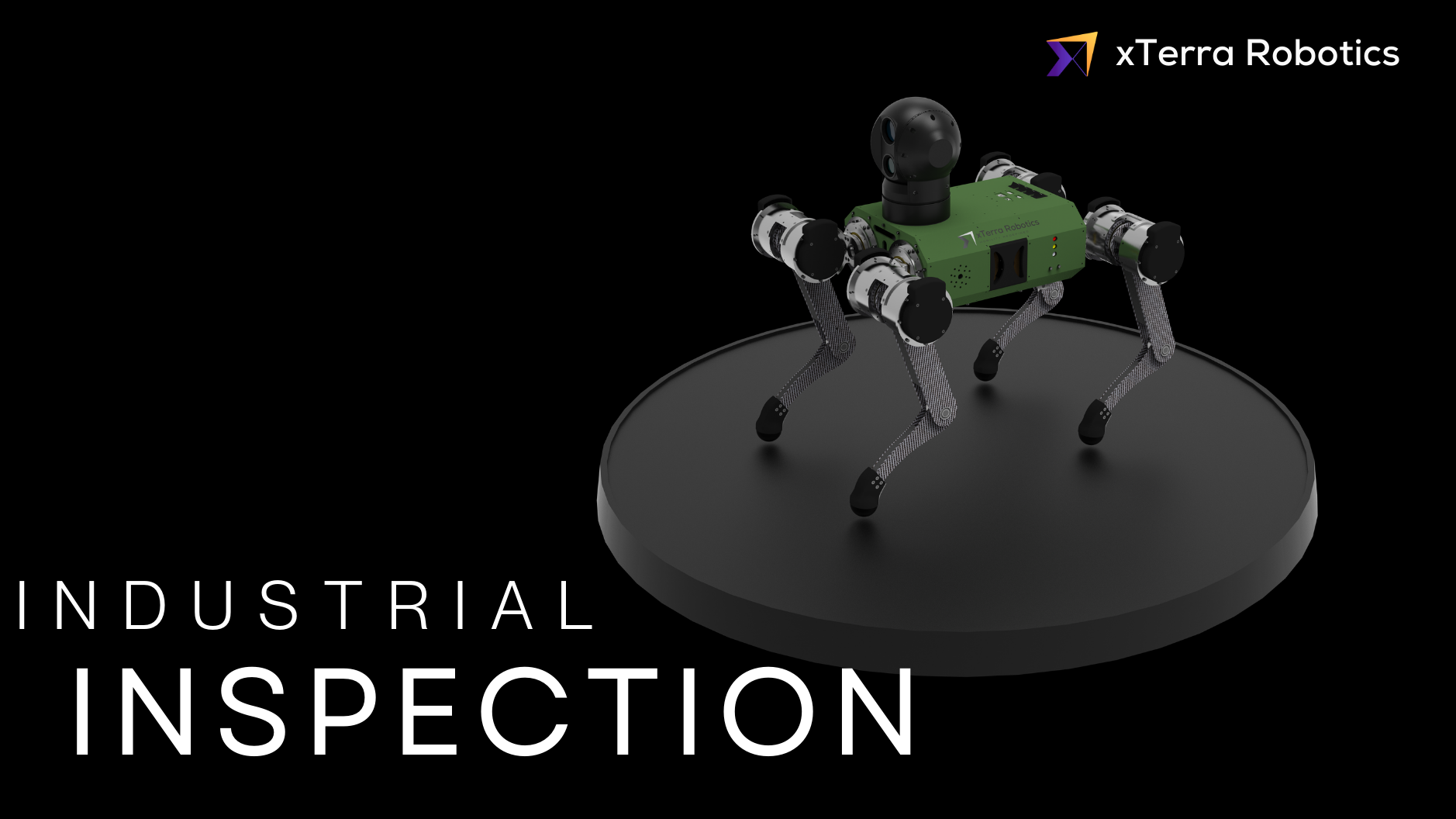
- IMU and joint encoders for proprioception
- 240 Wh battery capacity
- Onboard computer
- ROS-compatible, extensible software stack
- Push recovery via active compliance
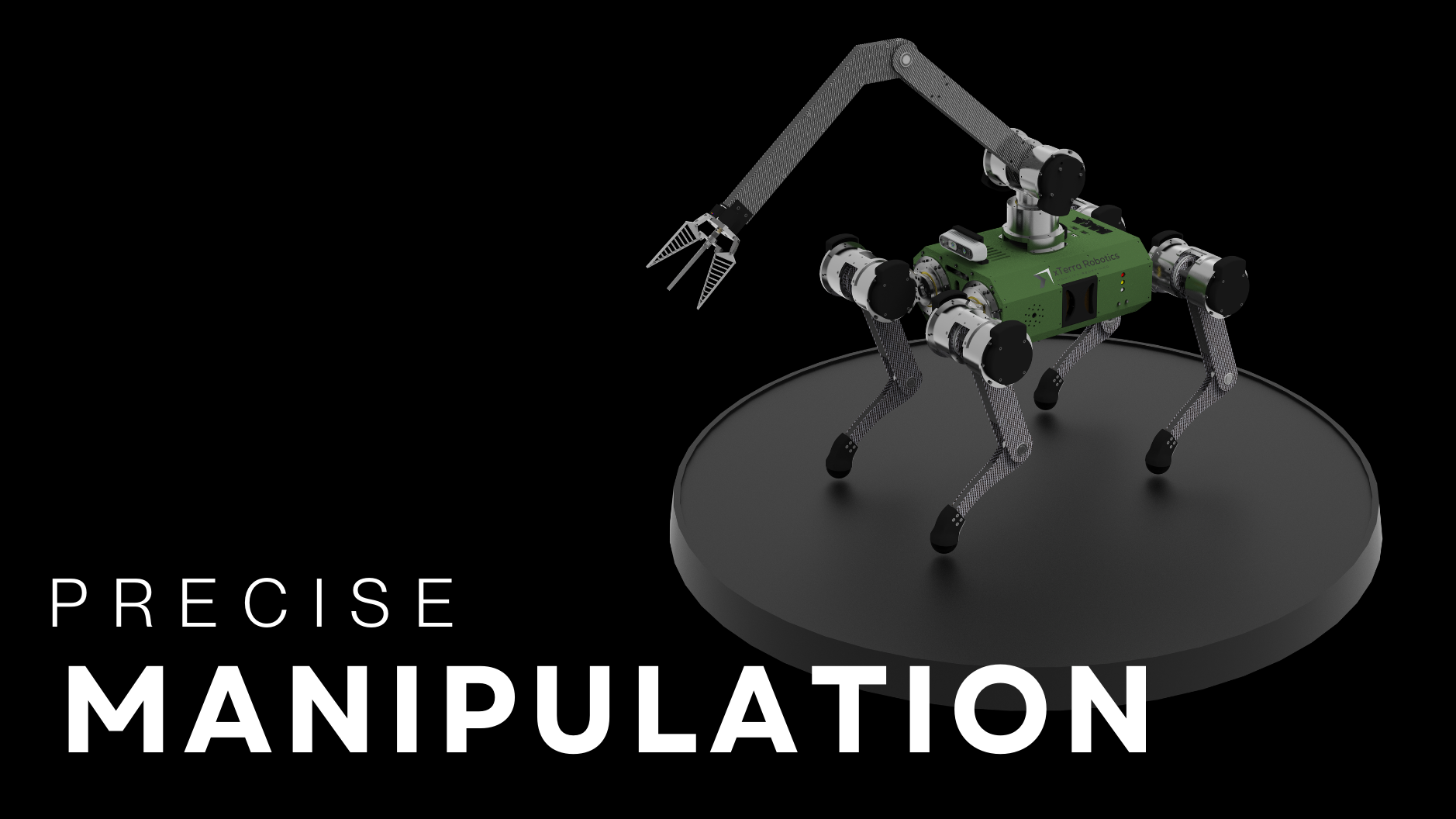
- User-friendly API for motion programming
- Remote control/real-time telemetry